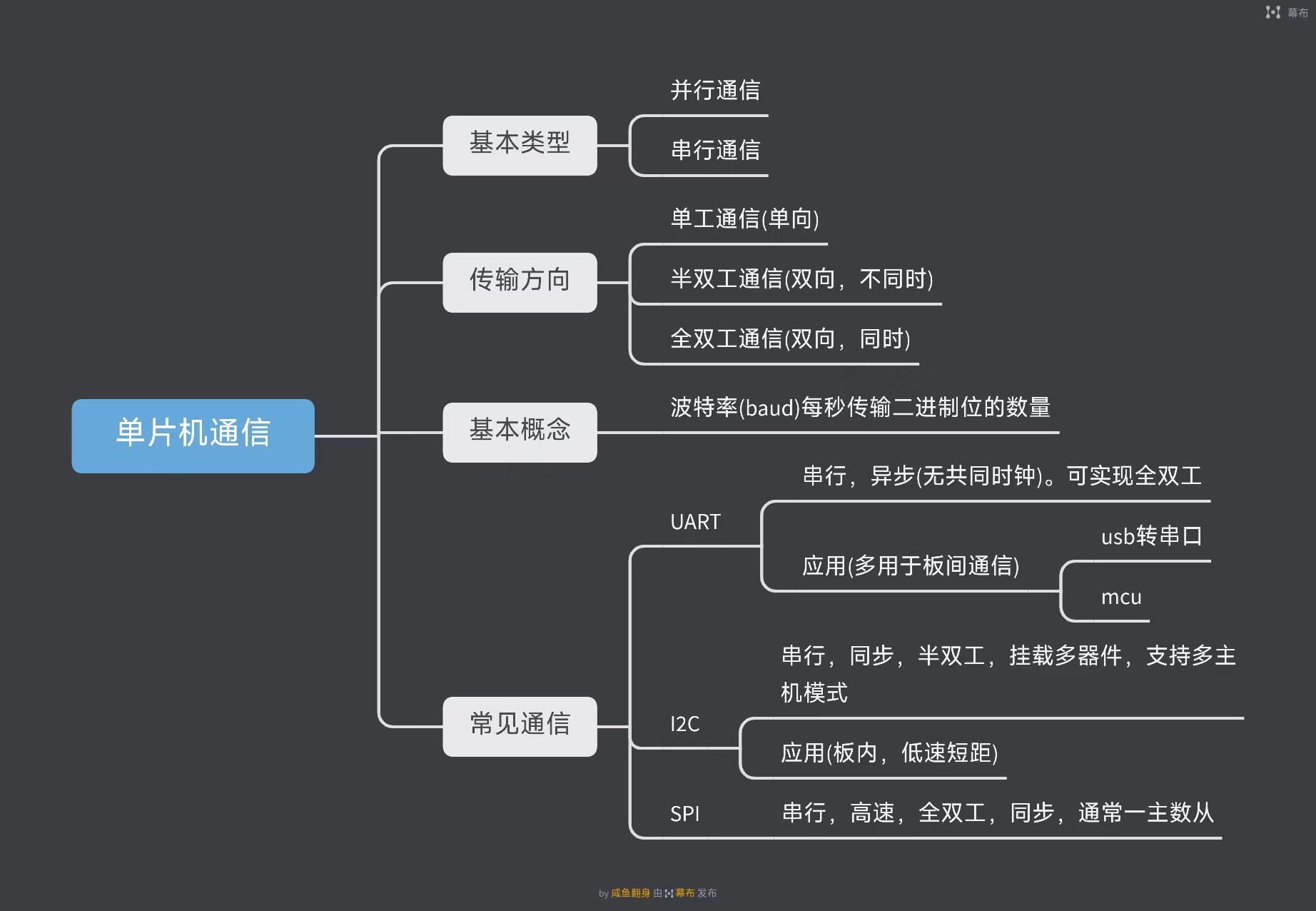
单片机的常见通讯协议
常见单片机通讯协议
I2c通信
https://blog.csdn.net/yanlaifan/article/details/72843577?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522170393696216800226590203%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=170393696216800226590203&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~sobaiduend~default-2-72843577-null-null.142^v99^pc_search_result_base3&utm_term=i2c%E9%80%9A%E4%BF%A1%E5%8D%8F%E8%AE%AE%E6%97%B6%E5%BA%8F%E5%9B%BE&spm=1018.2226.3001.4187
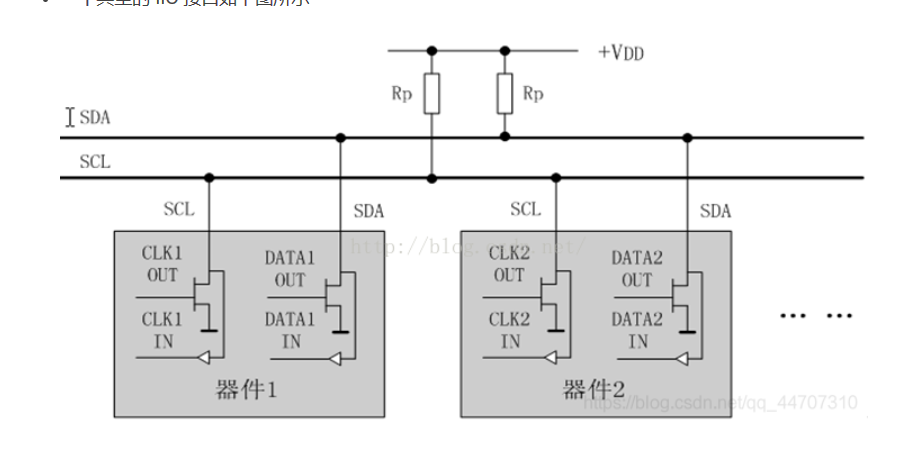
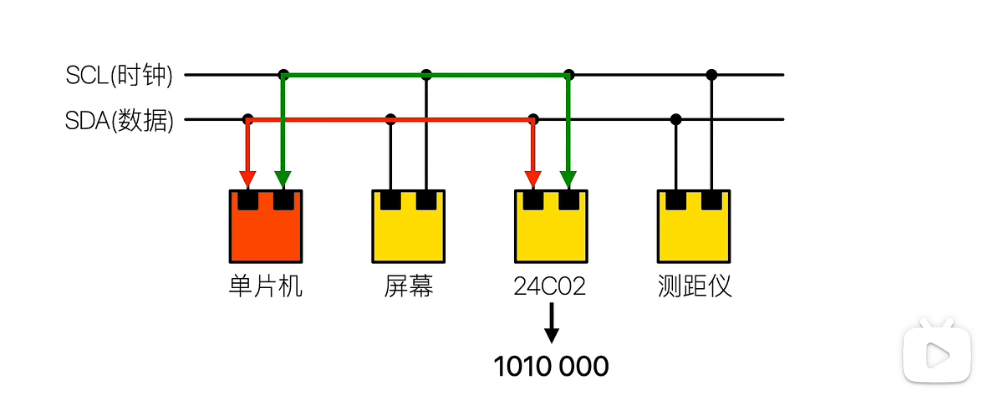
硬件层
两根线,SDA(数据)和SCL(时钟)
从最高位到最低位发送(MSB—>LSB)
协议层
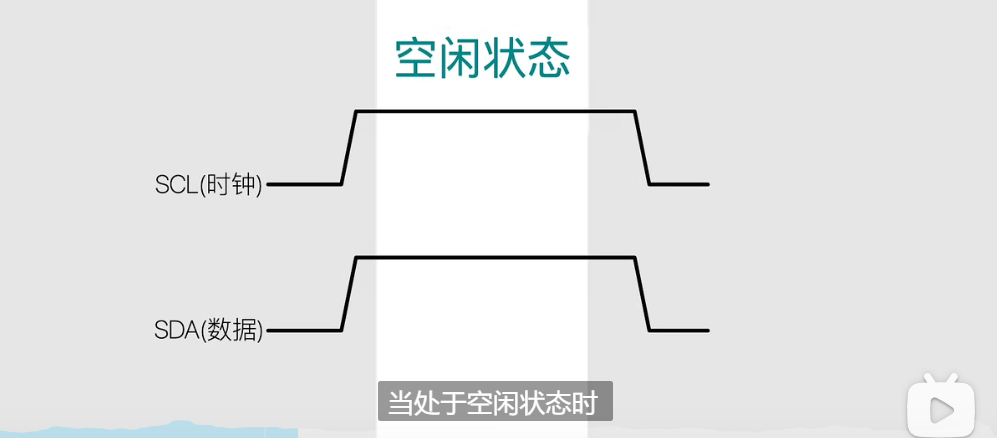
协议
- 空闲态
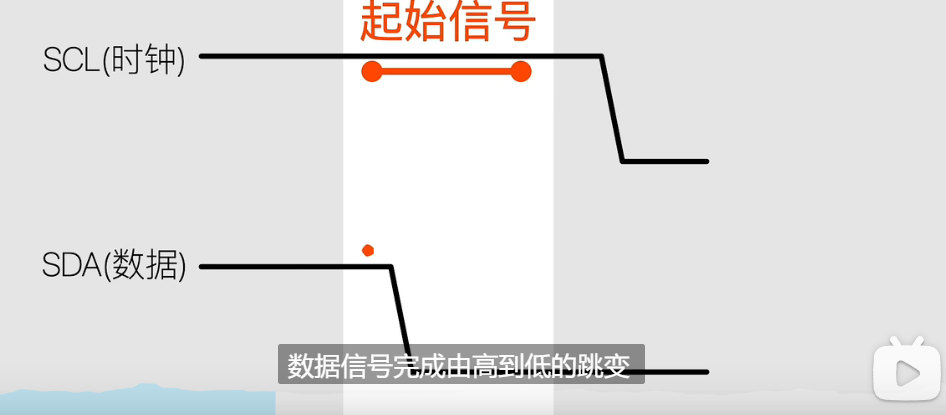
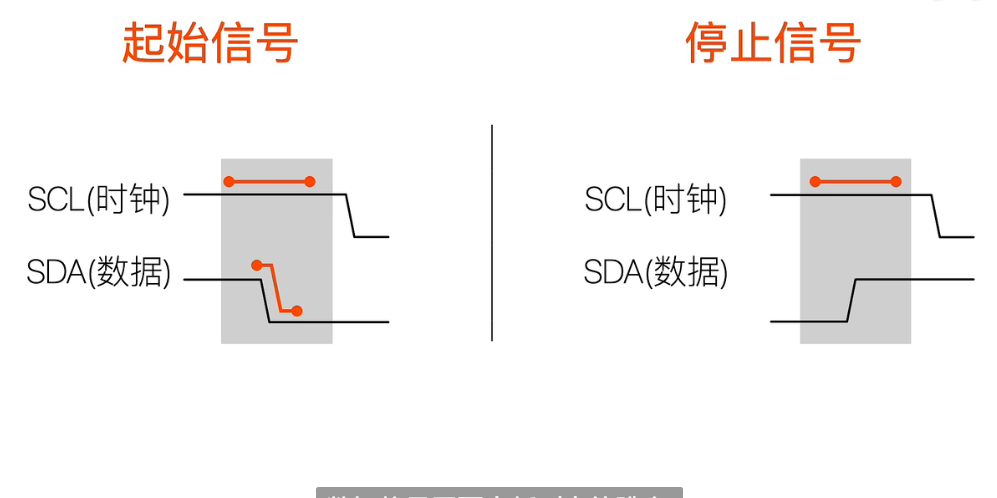
- 起始信号
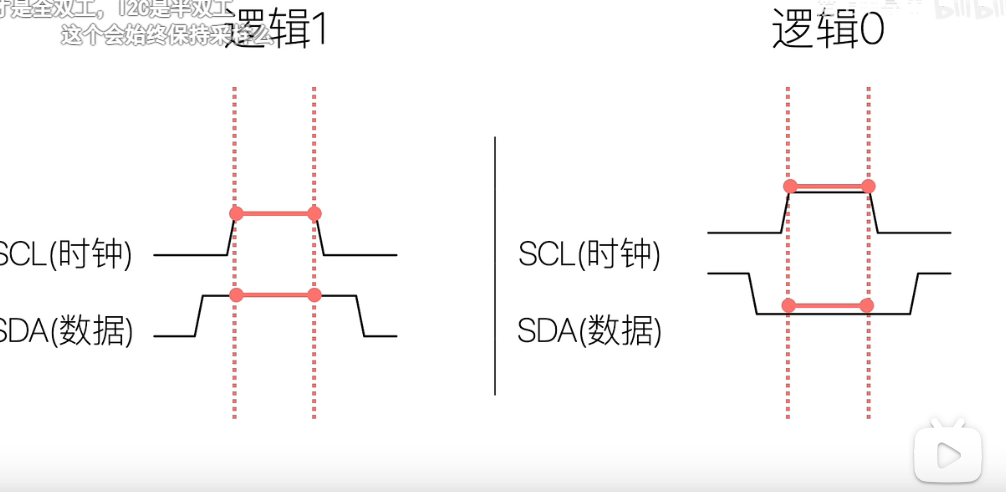
- 逻辑电平
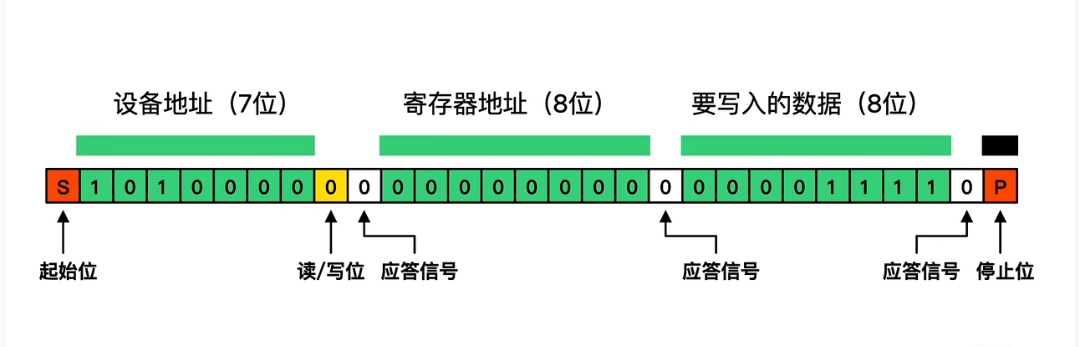
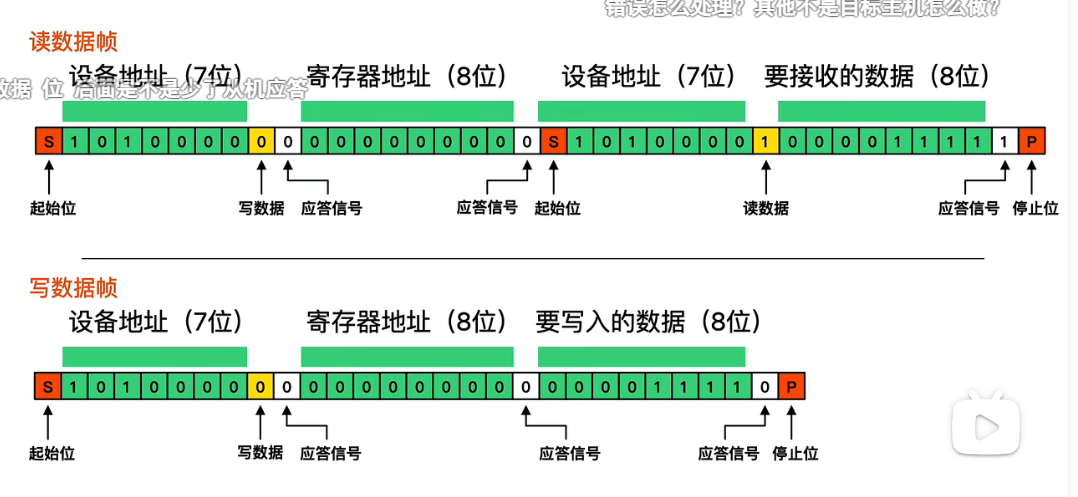
- 时序图
- 停止位
在时钟线为高时,数据线为高,为1,否则为0
代码
以51单片机为例
I2C.h文件
1
2
3
4
5
6
7
8
9
10
11
12
|
#ifndef __I2C_H__
#define __I2C_H__
void I2C_Start(void);
void I2C_Stop(void);
void I2C_SendByte(unsigned char Byte);
unsigned char I2C_ReceiveByte(void);
void I2C_SendAck(unsigned char AckBit);
unsigned char I2C_ReceiveAck(void);
#endif
|
I2C.cpp文件
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
| #include <REGX52.H>
sbit I2C_SCL=P2^1;
sbit I2C_SDA=P2^0;
void I2C_Start(void)
{
I2C_SDA=1;
I2C_SCL=1;
I2C_SDA=0;
I2C_SCL=0;
}
void I2C_Stop(void)
{
I2C_SDA=0;
I2C_SCL=1;
I2C_SDA=1;
}
void I2C_SendByte(unsigned char Byte)
{
unsigned char i;
for(i=0;i<8;i++)
{
I2C_SDA=Byte&(0x80>>i);
I2C_SCL=1;
I2C_SCL=0;
}
}
unsigned char I2C_ReceiveByte(void)
{
unsigned char i,Byte=0x00;
I2C_SDA=1;
for(i=0;i<8;i++)
{
I2C_SCL=1;
if(I2C_SDA){Byte|=(0x80>>i);}
I2C_SCL=0;
}
return Byte;
}
void I2C_SendAck(unsigned char AckBit)
{
I2C_SDA=AckBit;
I2C_SCL=1;
I2C_SCL=0;
}
unsigned char I2C_ReceiveAck(void)
{
unsigned char AckBit;
I2C_SDA=1;
I2C_SCL=1;
AckBit=I2C_SDA;
I2C_SCL=0;
return AckBit;
}
|
写入与读取1帧的数据
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
| void AT24C02_WriteByte(unsigned char WordAddress,Data)
{
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_SendByte(Data);
I2C_ReceiveAck();
I2C_Stop();
}
unsigned char AT24C02_ReadByte(unsigned char WordAddress)
{
unsigned char Data;
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS);
I2C_ReceiveAck();
I2C_SendByte(WordAddress);
I2C_ReceiveAck();
I2C_Start();
I2C_SendByte(AT24C02_ADDRESS|0x01);
I2C_ReceiveAck();
Data=I2C_ReceiveByte();
I2C_SendAck(1);
I2C_Stop();
return Data;
}
|
实验验证
4路OLED的驱动
基于I2C通信的陀螺仪