微机原理与接口技术
前言
距离第一次接触51单片机已有两年之久,当时跟着江科大的视频学了两个星期,完成了一些基本操作,随后就不怎么接触了,而关于微机的底层和通讯在之后的时间里,一直都是零散的学习,刚好借助此次课程的机会,记录一下自己的微机的学习。只记录重要知识点,配合教材使用。
课程概述
教材使用王晓萍的微机原理与接口技术
教材分为3个部分进行教学
- 微控制器原理
- 微机接口技术
- 微机系统设计
微机概述
微机两大分支
- 通用计算机(PC)
- 嵌入式计算机(MCU)
硬件结构
知识点讲解
基本结构
- 输入输出设备
- 存储器
- 控制器与运算器
存储结构分类
- 存算一体(哈佛结构)
- 存算分开(冯诺依曼结构)
0851硬件资源
- CPU
- RAM(128B数据存储器)
- ROM(4K程序存储器)
- 4个8位IO口
- 2个16位定时器/计数器
- 中断系统(5个中断源,2个优先级)
- 1个全双工串行口
- SFR(21个特殊功能寄存器)
0851功能特点记忆点
- 内部RAM,256B(2^8),地址为00H~FFH
- 外部RAM,最大64KB(2^16),地址0000H~FFFFH
- 内部ROM,4~64K,以8K为例(2^13)
- 外部ROM,最大64K,地址0000H~FFFFH
- 指令系统,复杂指令,CISC,111条。
0851功能引脚
- RST 需要两个机器周期的高电平
EA内部外部ROM片选,EA=0,只内,EA=1,在ROM大于FFH时转外部- ALE 低八位地址锁存允许信号输出端,有效时输出高脉冲
PSEN与外部ROM的OE相连,外部ROM选通输出端
0851引脚功能示意图
0851拓展外部ROM示意图
指令系统
- PC(程序计数器,16位)
- IR(指令寄存器,8位,存放当前指令的操作码)
- ID(指令译码器,)
指令执行过程
- 取指令
- 分析指令
- 执行指令
单片机的周期
- 时钟周期 $1/f_{osc}$
- 状态周期 $S = 2/f_{osc}$
- 机器周期 $T_{M} = 12/f_{osc}$
- 指令周期 执行一条指令所需要的时间。(单周期,双周期,四周期)
单片机的复位
复位是微控制器的初始化操作
- 上电复位(冷启动)
- 按键复位(热启动)
复位后,表现为SFR的复位状态。
- PC的值为0000H
- 堆栈指针SP的值为07H
- 四个IO锁存器输出为FFH,为准双向口模式的输入模式
- 其舍所有的SFR的有效值均为零。
注意:由于RAM数据在掉电后丢失,上电复位RAM数据为随机数,按键复位,内部RAM数据没有影响
文稿复位:
复位是微控制器的初始化操作。
单片机的复位有两种,上电复位(冷启动)和按键复位(热启动)。
下面是上电和按键复位的电路图。
上电复位时,需要要求高电平维持十毫秒以上,下面是上电复位RTS引脚的波形
按键复位时,在按下按键后,电容放电,然后电源对电容进行充电,充电会形成一个类似于上电复位的波形,需要要求超过24个时钟周期的高电平,也就是两个机器周期的高电平,即可完成复位。
复位后,表现为SFR(特殊功能寄存器)的复位状态。
- PC的值为0000H
- 堆栈指针SP的值为07H
- 四个IO锁存器输出为FFH,为准双向口模式的输入模式
- 其舍所有的SFR的有效值均为零。
注意:由于RAM数据在掉电后丢失,上电复位RAM数据为随机数,按键复位,内部RAM数据没有影响
微控制器的工作模式
微控制器的工作方式文稿:
微控制器共有三种工作方式,低功耗工作方式,程序执行方式和复位方式。其中,低功耗工作方式(省电方式)又分为休闲方式和掉电方式。
程序执行方式是微控制器的基本工作方式。
复位方式,复位是微控制器的初始化操作,复位后,SFR内容恢复初始值,CPU重新开始运行
低功耗方式又分为休闲方式和掉电方式。
低功耗方式有电源控制寄存器PCON的IDL位和PD位控制。
默认该两位为零,当pd为一的时候,进入掉电方式, Idl为一的时候,进入休闲方式,两者都为一的时候,进入掉电方式。
休闲方式(ID)时,内部时钟电路正常工作,CPU停止工作,中断,串行口定时器继续工作。可通过复位或者中断终止休闲方式。在休闲期间,中端触发后,IDL请0,退出休闲方式
掉电方式(PD)时,内部时钟不工作,所有功能单元停止工作。只能通过复位退出。
指令
111条指令
寻址方式
- 立即寻址(MOV A, #68H)
- 直接寻址(MOV A,68H ;将68H单元格的数据传送到A)
- 寄存器寻址(MOV A,Rn)
- 寄存器间接寻址(MOV A,@Rn)
- 变址寻址
- 相对寻址
- 位寻址
伪指令
用于帮助开发者更好地管理程序的结构和数据。这些指令本身并不会直接转换为机器代码,而是为汇编器提供信息或执行某些特定功能
1 | 1. ORG (起始地址) |
寻址方式
立即数寻址:
操作数是指令中直接给出的常数值。
例:MOV A, #10(将 10 直接送入 A 寄存器)。直接寻址:
操作数是内存地址,通过该地址访问数据。
例:MOV A, 30H(将 0x30 地址的数据送入 A 寄存器)。寄存器寻址:
操作数是寄存器的内容。
例:MOV A, R0(将 R0 寄存器的值送入 A 寄存器)。寄存器间接寻址:
操作数的地址由寄存器指向。
例:MOV A, @R0(R0 寄存器的内容作为地址,从该地址读取数据送入 A 寄存器)。
8051 单片机中有 4 组工作寄存器组,每组包含 8 个寄存器 (R0 至 R7)。因此,8051 单片机总共有 32 个工作寄存器。
变址寻址:
地址由基地址和偏移量(即变址)计算得到。
例:MOV A, @R0+DPTR(DPTR 和 R0 的内容相加作为地址,从该地址读取数据)。相对寻址:
地址是相对于当前指令地址的偏移量。
例:SJMP LABEL(跳转到当前地址偏移 LABEL 的位置)。位寻址:
操作数是内存中单个位,直接操作某一位。
例:SETB 30H.0(将 0x30 地址的第 0 位设为 1)。
寻址方式和寻址空间
中断
通信
传输方式分类
串行通信
数据传输速度快。
需要更多的传输线。
适合短距离通信。
距离增长时,位数增多时,会提高硬件成本,降低通信成功率并行通信
线路简单,成本低
适合长距离通信
传输速度慢
按时钟线分类
- 异步通信
- 同步通信
按传送方向分类
- 单工
- 半双工
- 双工
异步串行通信
例:UART、RS-232、RS-485
帧格式
起始位
数据位
低位在前,高位在后奇偶校验位
这是一个用于错误检测的位,可以是无校验(None)、奇校验(Odd)、偶校验(Even)、标记校验(Mark)或空位校验(Space)。
确保数据帧与校验位的1个数为奇数为奇校验,为偶数,偶校验
停止位
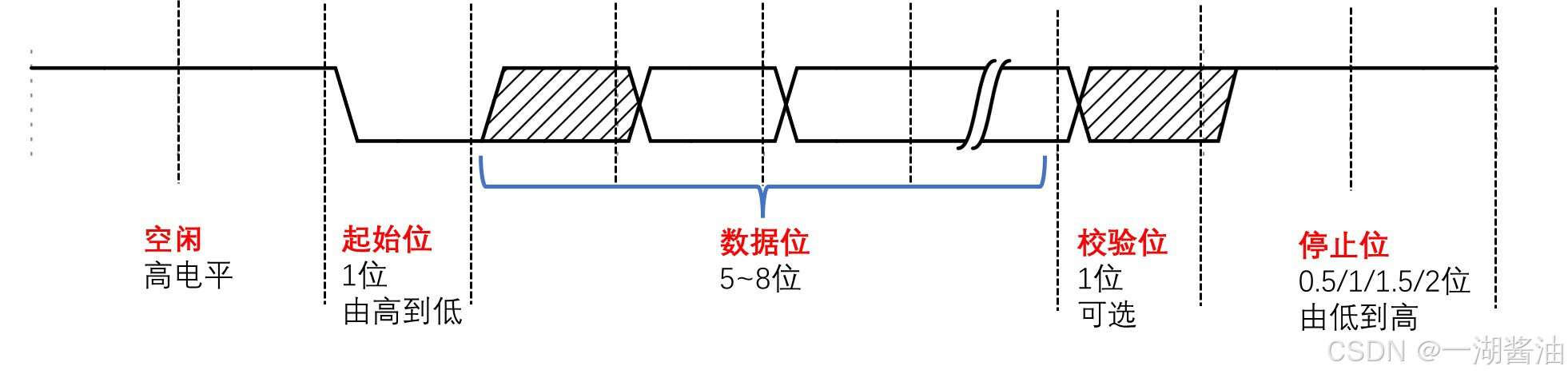
常用的帧格式为:1位起始位+8位数据位(一个字节)+无校验位+1位停止位 即一帧10个bit
波特率
对于串口通信,波特率代表每秒传输的bit的数量。
如常用的9600波特率代表了一秒钟可以传输9600个bit的信息。即信号宽度为0.104ms
校验方式
- 字节的奇偶校验
- 数据块的累加和校验
- 数据块的循环冗余校验CRC
把数据块看成二进制数,用特定数除以它,取余数
UART
键盘
工作方式
- 编程扫描方式
- 定时扫描方式
- 中断扫描方式
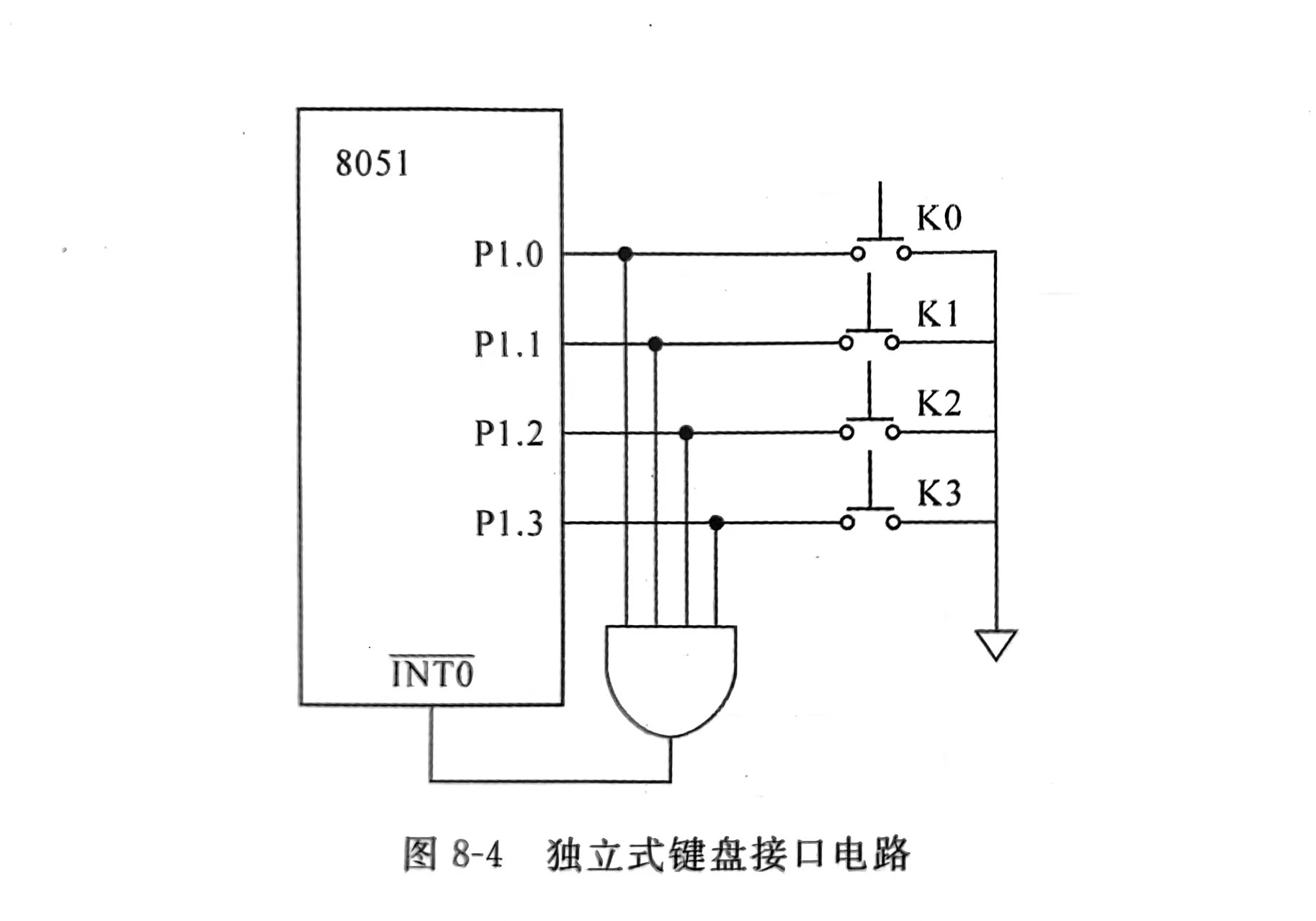
独立键盘
矩阵式键盘
- 行扫描式
- 线路反转法
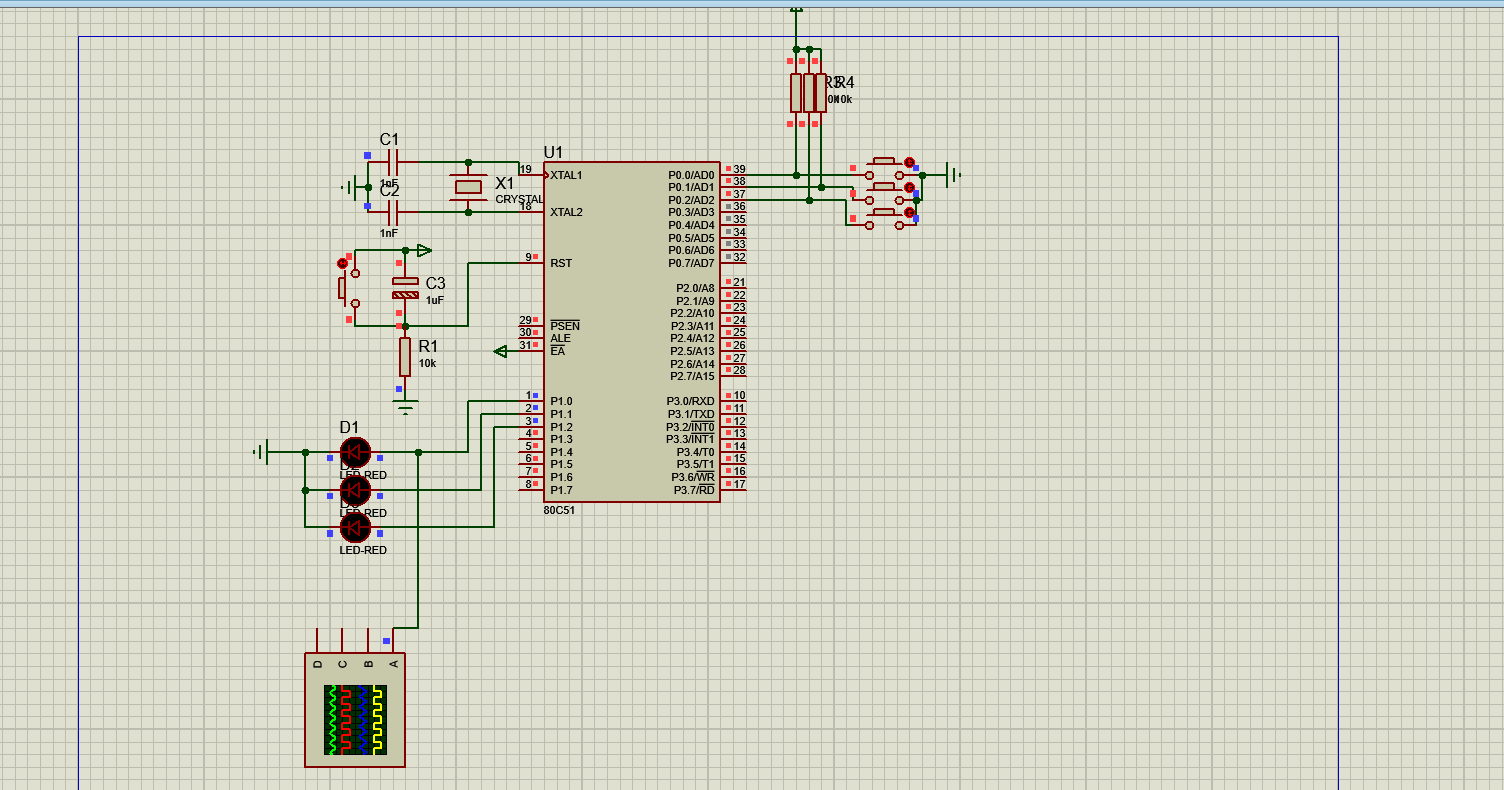
代码分析
点亮LED
1 | ; 点亮 LED 的汇编程序 |
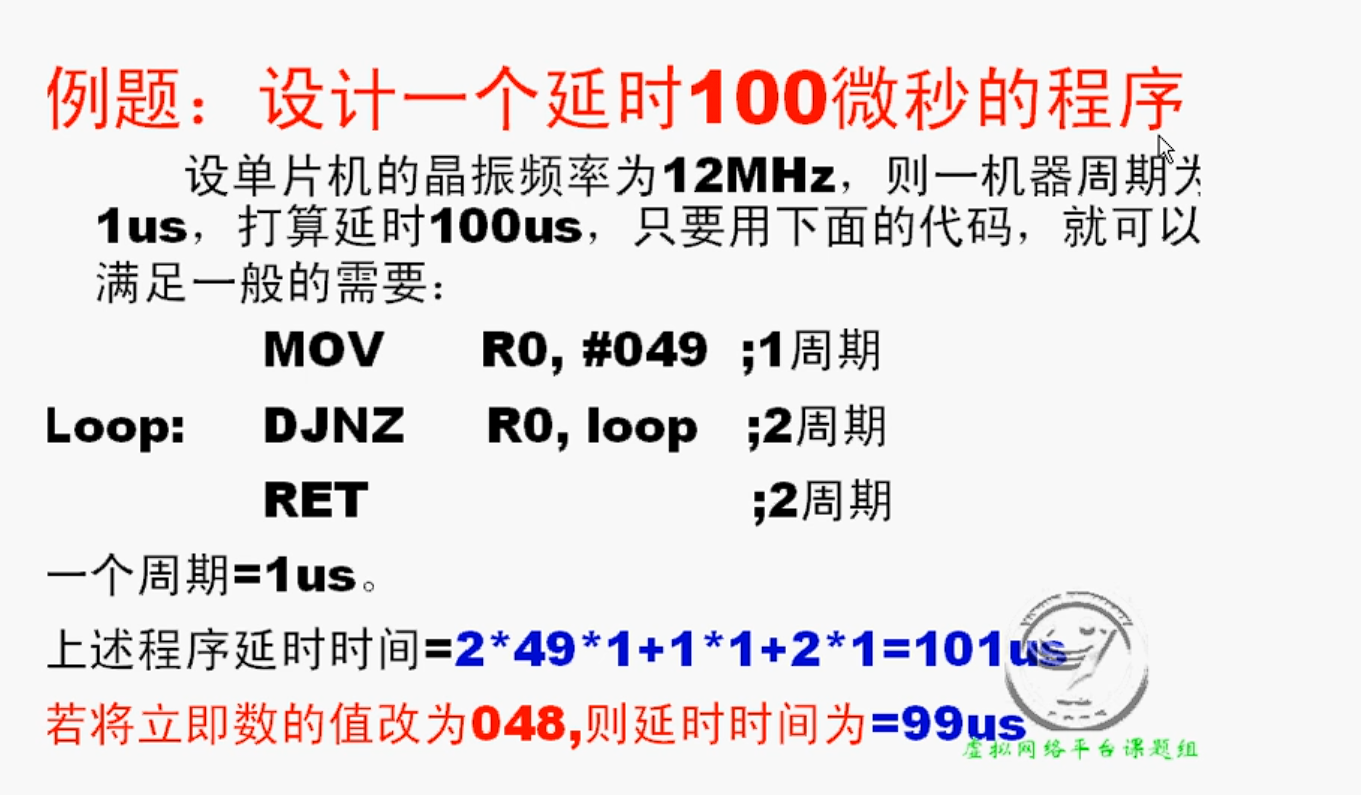
延时
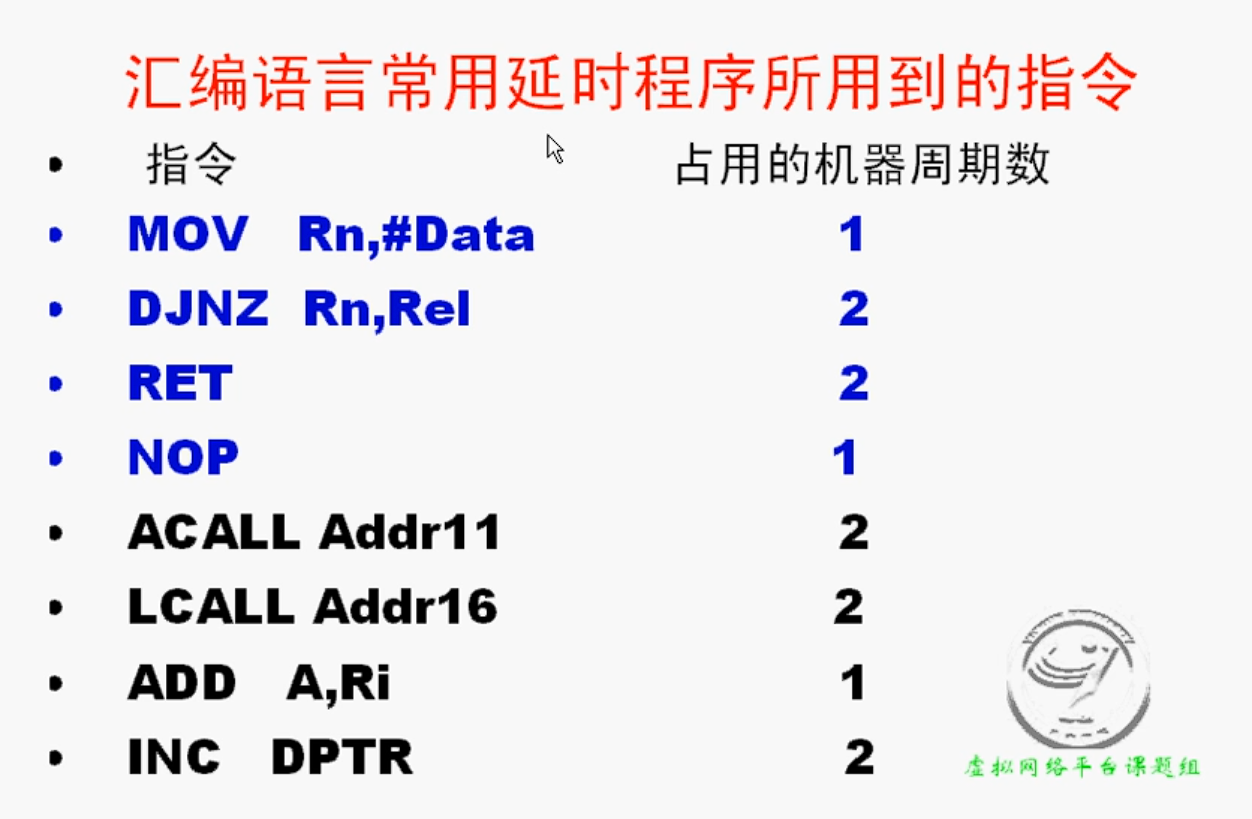
单循环
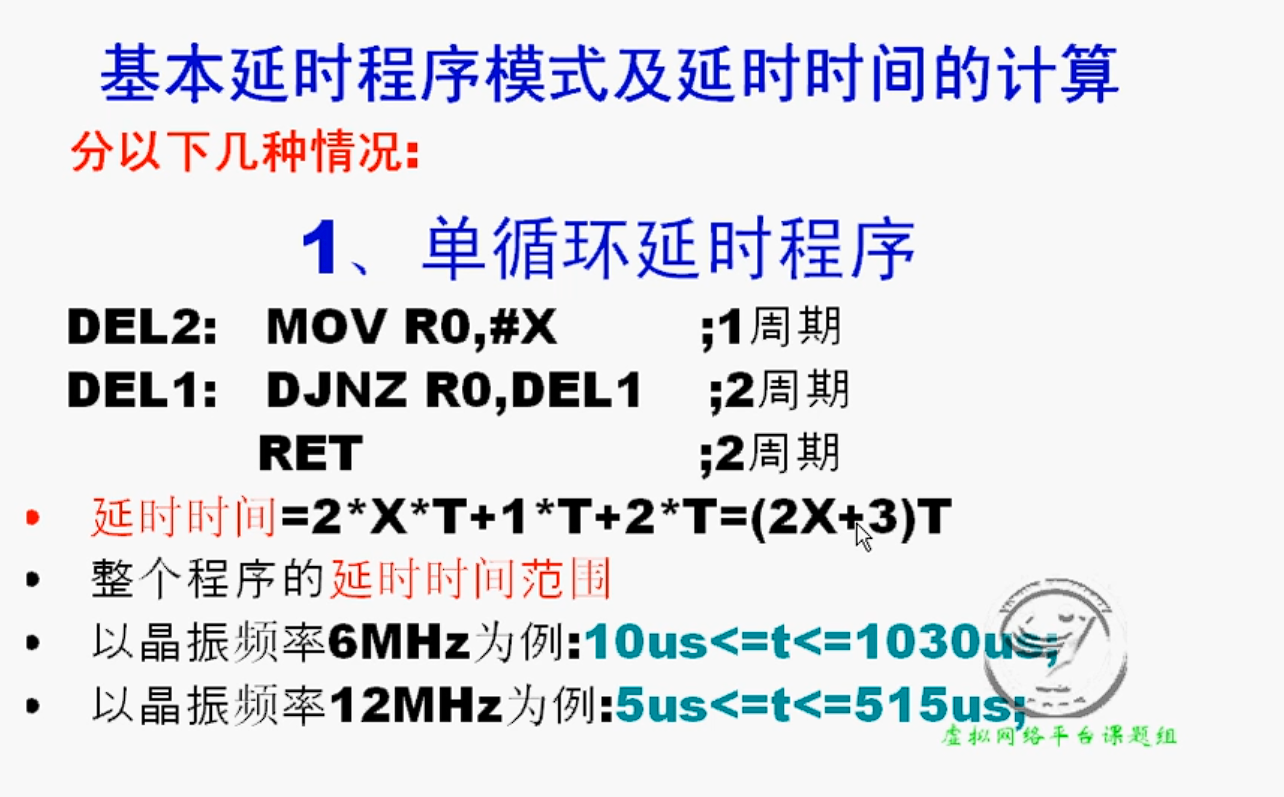
注意:当X为0时,实际是256,R0是8位寄存器(同R1,R2,R3);0<=R0<=256
双重循环


亮灯,一闪一闪
1 | ORG 10H ; 程序起始地址 |
按键控制LED亮灭

1 | ORG 0000H ; 程序起始地址 |
1 |
|
1 | ;1. 仔细体会本段仿真效果,再删除延时脚本程序编译之后,你看看会有什么效果? |